


1. 서 론
최근 몇 년 동안 무인항공기의 기술이 급속도로 발전함에 따라 소방용 드론 기술 역시 고도화 되어 드론의 휴대성과 경제성 등 많은 장점으로 인해 소방 분야에서 다양하게 활용되고 있다(1). 지난 몇 년간 소방용 드론은 주로 산불 진화에 초점을 맞추거나 시스템 장치를 활용하여 소방경로를 예측하거나 관련 화재데이터를 수집하여 전개작업을 지원하고 소방작전을 완수하도록 하였다(2,3). 최근에는 산불뿐만 아니라 인간에게 매우 위험한 것으로 간주되는 다양한 응용 분야에 점점 더 많이 사용되고 있다. 화재는 산림 및 산불, 송유관, 가스 배출, 건물 등과 같은 다양한 자연 및 경제 영역에 막대한 영향을 미치며 UAV 기술의 발전은 화재 확산을 제어하고 방지하는 데 큰 역할을 할 수 있다.
드론은 운용하는 목적에 따라 요구되는 성능이 상이하지만, 운용 목적에 부합하지 않는 드론의 도입으로 인해 활용성이 매우 저조한 실정이다. 2016년을 기준으로 소방용 드론의 월평균 활용은 0.6건으로 요구 성능에 적합하지 않은 드론의 도입이 가장 큰 문제점으로 지적되었다. 이에 따라 소방용 드론의 운용 목적에 부합하는 성능의 드론 도입이 시급하다(4).
그러나 국내의 경우 운용 목적에 따른 성능 기준의 부재로 인해 중국산 드론의 도입이 빈번하다. 국내에서 진행된 드론 산업 추진 결과 국내 드론 시장의 규모가 6배 이상 성장한 반면 공공분야의 경우 여전히 중국산 드론의 비중이 높은 것으로 나타났다(5). 국내에서 2017년부터 정부 차원에서 ‘혁신 성장 8대 핵심 사업’으로 지정하여 드론 산업에 대응하였으나 아직 초기단계이며, 드론 관련 특허 중 한국의 비중은 2018년 기준 7%로 미국 28%, 중국 14% 등 주요 선진국 대비 낮으며, 핵심부품 기술력 또한 상대적으로 미흡하다(6). 이러한 문제들을 해결하기 위해서는 각 소방현장 상황에 적합한 성능을 가진 소방드론의 활용이 요구된다.
따라서 본 연구에서는 국내의 소방현장 중심 드론 성능 평가 요소에 관한 연구나 방법이 없다는 점을 고려하여 국내외 검⋅인증체계 및 문헌을 참고하여 기초자료를 구축하였다. 또한, 델파이 기법을 활용하여 소방용 드론 성능 평가 체계의 필수 평가 요소를 선정하고자 한다.
2. 이론적 고찰
2.1 국내외 드론 검⋅인증체계 시험평가 고찰
본 연구에서는 드론 검⋅인증체계 시험평가에 관한 고찰을 위해 국내외 선행연구를 분석하였다. 먼저 국내 항공우주연구원의 ‘재난 치안용 무인기’의 경우 개발 시험 평가와 통합 시스템 시험평가로 분류되며 17개의 항목으로 구성되어 있다(7). 한국신뢰성인증센터의 ‘산업용 소형 멀티콥터 무인기’의 신뢰성 평가 기준의 구성은 종합 성능 평가, 내환경성, 안정성, 수명으로 구분되며 총 22가지의 평가 기준으로 구성된다(8). 한국건설생활환경시험연구원의 ‘무인항공기 시스템 시험’의 경우 비행성능, 환경성, 통신, 기타의 평가 기준이 있으며 총 13개의 시험 항목으로 구성된다. 한국소비자원의 ‘취미용 드론 안전⋅품질 시험’의 경우 시중 판매드론의 안전성 및 품질 시험을 수행하며 소비자 및 전문위원회의 심의를 거쳐 12개의 상세한 시험항목과 시험 내용 및 방법을 제공한다. 항공안전기술원의 ‘초경량비행장치 안전성인증’의 경우 설계 및 제작기준, 시험비행 및 안전성인증 기준, 안전성 유지 및 관리 등의 항목으로 드론(무인멀티콥터)의 안전성인증을 수행한다.
국외 독일 TUV SUD사의 경우 드론의 성능, 풍질 및 안전에 대한 테스트 및 인증 서비스를 실시하고 있다. 시험 항목으로는 전기적 안전 테스트, 배터리 안전 테스트, 환경 테스트, 기계적 안전 테스트가 있으며 총 13개의 세부 항목으로 구성되어있다(9). 일본의 드론 기체 성능 평가 기준 보고서의 비행성능, 안전성능, 신뢰성능, 내구성, 환경저항, 환경 부하 성능의 시험항목이 있으며 총 53개의 세부 평가 요소로 구성되어있다. 일본의 경제산업성 산하 신에너지 산업기술종합개발기구에서는 드론 등 무인기의 성능 평가 절차서를 발표함과 동시에 시험 항목 및 평가 요소를 제시하였다. 시험 항목은 비행 성능, 내환경 성능, 환경 부하 성능, 야간 운용, 가시권 운용, 주변 환경, 위험환경, 비행성능, 임무대응, 안전성능, 사고대응으로 분류되며 총 49개의 세부 요소로 구성된다(10).
2.2 델파이 기법 전문가 설문 고찰
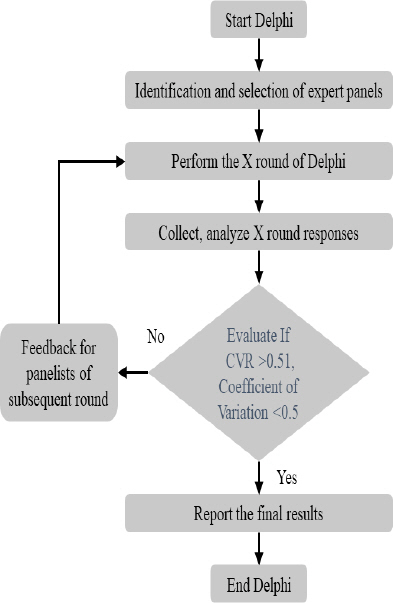
델파이 기법 설문은 체계적인 상호 작용의 방식으로 진행되는 기술로서, 전문가 패널의 지식은 통제된 피드백에 의해 산재된 일련의 설문을 통해 수집된다. 본 설문조사의 궁극적인 목표는 응답의 편차를 줄여 그룹 공감대를 형성하는 것이며 실용적인 관점에서 봤을 때 델파이 기법 설문은 매우 효과적인 의사결정 방법이다. 응답자가 프로세스 전반에 걸쳐 익명으로 유지되므로 개인의 지배적인 영향을 피할 수 있다(11). 델파이 설문 절차는 익명성, 반복, 모든 그룹 구성원에 대한 응답의 통제된 피드백, 개인 응답의 통계적 집계라는 네 가지 기본 원칙으로 정의된다(12). 가장 기본적인 형태의 델파이 절차는 개인 그룹이 단일 정량적 추정치에 대한 일련의 질문에 익명으로 응답하도록 지시하는 것을 포함하는 것이다. 그런 다음 진행자는 그룹 응답의 통계적 요약(예: 평균, 중앙값 등)으로 결합하거나 집계하며 때로는 응답에 대한 이유와 함께 제공 할 수 있다(13). 개인은 받은 다양한 응답을 고려한 후 수정된 응답을 제출하거나 첫 번째 응답을 다시 제출하도록 요청받는다. 이러한 반복 및 제어된 피드백 프로세스는 명백한 합의 또는 주목할 만한 불일치의 형태로 일관된 응답 패턴에 도달할 때까지 다양한 ‘라운드’에 걸쳐 계속된다.
본 연구에서는 Delphi 기법 설문 결과 도출된 지표들을 대상으로 설문 결과의 추정이 타당한지를 알아보기 위해 Lawshe (1975)가 제시한 바 있는 content validity ratio (CVR)을 바탕으로 내용타당도를 검증하였다. 내용타당도(CVR)는 전문가 집단의 수가 15명일 때 유의도 0.05 수준에서 0.49 이상 요소들에 대해 내용타당성이 있는 것으로 판단한다. 따라서 CVR값이 0.49 이하로 나타난 경우 내용타당도가 낮음을 의미하며 항목에서 소거될 수 있다(14). 내용타당도 검증은 다음 식(1)에 나타난다.
식(1)에서 N는 응답자의 수를 의미하며 NE는 ‘중요하다’라고 응답한 응답자의 수를 의미한다.
3. 델파이기법 설문 개요
본 연구에서는 델파이 기법 설문을 총 3회 실시하였으며 응답자의 공감대 형성과 의견 조율을 위해 모두 Likert 5점 척도를 사용하여 진행하였다. 설문지 구성의 경우 이해도를 높이기 위해 연구의 목적 및 과정을 설명하고, 국내외 드론 검인증 체계 분석을 통하여 도출된 평가항목 중 공통 및 비 공통 평가 요소에 대한 정보제공과 동시에 1라운드 설문조사를 실시하였다. 구조화된 폐쇄형 질문과 개방형 질문을 함께 구성하여 자유로운 의견 수렴을 실시하는 개방형 설문조사를 진행하였다. 2라운드 설문조사는 1라운드 설문조사 결과 분석 내용을 토대로 폐쇄형 설문을 실시하였다. 1라운드 설문조사 결과 분석 시 평균, 표준편차 및 사분위수 범위를 정보를 제공하여 설문을 진행하였다. 3라운드 설문조사 또한 폐쇄형으로 실시하였으며 2라운드 설문조사 결과 분석을 통해 각 지표별 평균값, 표준편차, 사분위수 범위를 표시하고 대다수의 의견과 공감대를 형성할 수 있도록 유도하였다(18,19).
3.1 전문가 패널 선정
델파이기법 설문은 2022년 11월 2일부터 16일까지 3라운드에 걸쳐 총 15명의 전문가들을 패널로 선정하여 진행하였다. 전문가 패널 선정 시 소방현장시나리오 중심 드론 성능 평가 체계와 관련이 있다고 판단되는 드론 분야 전문가, 소방 분야 전문가, 인증체계 분야 연구자, 소방 실무자를 대상으로 판단표본 추출법을 통해 패널을 선정하였다. 전문가 패널의 분야, 나이, 학력, 관련 경력은 다음 Table 1과 같다.
Table 1
Characteristics of the Expert Panel
3.2 드론 검⋅인증 시험 공통 및 비 공통 성능 요소 도출
국내외 드론 검⋅인증 체계 분석을 통해 추출된 검⋅인증 시험 평가항목 중 공통으로 포함하고 있는 평가 요소를 도출하였으며 Table 2에 자세히 나타난다.
Table 2
Common Evaluation Factors for Domestic and Overseas Drone Inspection and Certification Tests
국내외 성능평가 요소 중 공통 성능 요소를 제외한 평가 요소 항목들은 다음 Table 3과 같다.
Table 3
Uncommon Evaluation Factors for Domestic and Overseas Drone Inspection and Certification Tests
4. 델파이기법 기반 설문 결과 및 분석
4.1 델파이기법 1라운드 설문
드론 성능평가 요소는 일반적으로 비행성능, 내환경성, 안전성능, 통신성능 평가로 나누어진다. 본 연구에서도 일반적인 드론 성능평가 요소와 같이 소방현장 시나리오 중심 드론 성능 평가체계를 4단계의 성능(비행, 내환경성, 안전, 통신)으로 구분하였다. 1라운드 설문에 앞서 2장에서 국내⋅외 드론 성능 평가체계 분석을 통해 추출된 공통, 비공통 요소를 합집합하여 전문가 패널에게 정보를 제공하였다. 제공된 기초자료를 기반으로 델파이 1라운드 설문조사는 전문가들이 자유롭게 의견을 제시할 수 있게 개방형 설문으로 실시하였다.
1라운드 설문조사 결과 대다수의 전문가가 기초자료로 제시된 평가 요소들 중 비행성능, 안전성능, 통신성능 항목에 대해서는 평가요소로 적합하다는 응답을 하였다. 내환경성 항목에 대해서는 ‘내환경성 평가 상세항목은 조금 비현실적으로 느껴집니다’, ‘내환경성 등 하드웨어 안정성을 판단하는 항목보다 소프트웨어 등 시스템 안정성 평가 항목에 좀 더 가중이 되어야 함’, ‘수요자가 직접 소방현장 시나리오 기반으로 드론 비행 수행하였을 때(하드웨어⋅소프트웨어 등) 성능 평가할 수 있도록 체크리스트 개발이 되어야 함’과 같은 의견이 제시되었다. 추가적으로 ‘소방 무인멀티콥터 기본규격’, ‘국내 소방분야 드론 보유 및 활용 현황’ 등의 자료를 참고하여 평가 요소를 추가해야 한다는 의견이 제시되었다. 이에 2차 설문 실시에 앞서 전문가 자문을 거쳐 평가 요소를 수정 및 보완하였으며, 그 결과는 다음 Table 4와 같다.
Table 4
Delphi Round 1 Survey Results
4.2 델파이기법 2라운드 설문
델파이 2라운드 설문조사에서는 1라운드 설문의 결과인 43개의 평가 요소를 대상으로 Likert 5단계 척도를 적용하여 폐쇄형 설문을 실시하였다. 2라운드 설문부터는 내용타당도를 분석하였으며, 표준편차와 변이계수를 이용하여 전문가들의 의견이 수렴하였는지 평가하였다.
델파이 2라운드 설문조사부터는 1명의 전문가 패널의 무응답으로 인해 14명의 전문가 패널들을 대상으로 설문을 진행하였다. 전문가 패널 집단의 수 변동으로 인하여 내용타당성 판단을 위한 내용타당도(CVR)의 평가 기준을 유의도 0.05 수준에서 0.51 이상으로 변경하여 분석을 수행하였다. 2라운드 설문조사 결과, 43개의 평가 요소 중 32개의 평가 요소에서 내용타당도가 0.51 이상의 값이 도출되었다. Table 5와 같이 표시된 비행 속도, 비행 고도, 정지 비행 성능, 적재 중량, 최대 추력, 경로 편차 방지, 고도계, 전자파적합성, 비상 조종기 기능, 기본동작 8채널, 구동방식 변경 기능 항목은 필수 평가 요소로 타당하지 않다는 결과가 도출되었다.
Table 5
Delphi Round 2 Survey Results
4.3 델파이기법 3라운드 설문
델파이 3라운드 설문조사에서는 2라운드 설문 결과를 전문가 패널에게 제시하여 질문에 대한 반응을 재고하도록 하는 피드백형 설문을 실시하였다. 또한, 2라운드 설문의 통계치(평균, 표준편차, 사분위수)를 함께 제공하여 전문가 본인의 의견을 수정할 수 있는 기회를 제공하였다.
3라운드 설문조사 결과, 2라운드 설문조사의 결과인 32개의 평가 요소에서 내용타당도가 0.51 이상으로 타당성이 있는 것으로 나타났다. 2라운드 설문조사에서 내용타당도가 0.51 미만으로 소방현장 시나리오 중심 드론 성능평가 체계에 필요한 필수 평가 요소로 타당하지 않다는 결과가 도출된 11개의 평가 요소에 대해서는 여전히 내용타당도가 0.51 미만으로 나타났다. 2라운드 설문조사에 비해 의견일치도가 평균 0.11 감소하였고, 변이계수는 평균 0.02 감소하였음이 확인되었다. 이는 설문의 횟수가 거듭되면서 전문가 패널들의 의견이 수렴하였음을 의미한다. 3라운드 설문에서 모든 평가 요소의 의견일치도와 변이계수가 기준치를 만족하였으므로 본 연구에서는 3라운드 설문조사에서 델파이 설문을 종료하였다. 최종 선정된 소방드론 성능평가 체계에 필요한 필수 평가 요소는 4개의 평가사항에 32개 항목으로 델파이 설문 결과는 Table 6과 같다.
Table 6
Delphi Round 3 Survey Results
5. 결 론
본 연구에서는 소방용 드론의 성능평가 필수요소를 도출하기 위해 국내외 드론 검⋅인증체계 시험평가 관련 선행연구를 통해 공통 및 비공통 성능 요소를 도출하였다. 도출된 요소를 기반으로 3라운드에 걸친 델파이법 전문가 설문을 통해 전문가 패널의 의견을 취합하여 분석하였다. 본 설문의 객관성 확보를 위해 관련 분야 전문가 15명이 설문에 참여하였다. 설문 분석 결과 총 4가지의 평가사항 중 ‘기체(기본성능)’ 항목에서 13가지의 성능평가 요소가 도출되었다. ‘배터리’ 평가사항에서 2가지, ‘GCS 및 조종기(통신)’ 평가사항에서 12가지, ‘임무장비’ 평가사항에서 총 5가지의 성능평가 요소가 도출되었다. 도출된 32개의 성능 평가 요소들은 각각 내용타당도, 의견일치도 및 변이계수가 충족되어 모든 전문가의 의견 수렴과 조율이 이루어 졌다고 사료된다. 본 연구를 통해 최종 선정된 소방드론 성능평가 체계에 필요한 필수 평가 요소 32개의 항목은 소방현장의 소방드론 성능 평가 기준을 구축하는데 기초자료로 활용할 수 있을 것으로 판단된다. 향후 드론 성능 평가 매뉴얼 개발을 통해 평가 기준 및 항목별 평가 방법을 수립한다면, 활용 시 기여도가 높을 것으로 사료된다.




