


1. ě ëĄ
íěŹ ëë Ľ ě ëŹěŠ íě 체뼟 íŹí¨í ěť¨ë˛ ě´ě´ ë˛¨í¸ ěě¤í
ě ę´ě° ë° ěëŠí¸ ě°ě
ëąě ëśěźěě ěěŹ ě´ěĄě ěí ě¤ěí ěě¤í
ěźëĄ ěŹěŠëęł ěěźëŠ° ęł ěĽ ëąě ěí ě´ě ě ě§ë í° ěě¤ě ě´ëíę˛ ëë¤. ě´ëŹí íě 체ě ęł ěĽě 쥰기ě ë°ę˛Źí ę˛˝ě° ě댏 ëąě 쥰ěšę° ę°ëĽíë, ęł ěĽě ë°ę˛Źě´ ëŚě´ ěŹę°í ę˛˝ě° ěť¨ë˛ ě´ě´ ěě¤í
ě ě´ě ě ě ě§íęł íě 체ě ęľě˛´ę° ě§íë ëęšě§ ěěĄ ěě
ě´ ěĽę¸°ę° ě¤ë¨ëë¤(1). ëí, ěť¨ë˛ ě´ě´ 벨í¸ëĽź íľí´ ě´ěĄëë ěí, ěëŠí¸ě ę°ě ěí 돟ě§ě ěě°ë°í ë° ëśě§íë°ě ě ë°íěŹ ę¸ę˛Ší ě°ěíë ë° íěŹ ěíěąě ěŚę°ěí¨ë¤. ëí ěť¨ë˛ ě´ě´ ë˛¨í¸ ë´ě ë¤ě ë°°ěšëë ë˛ ě´ë§ ëë 륤ëŹë¤ě íě ë° ęł ěĽě ěě¤í
ě 체ě ěěě ěźěźí¤ęą°ë íěŹëĽź ě ë°í ěë ěë¤(2).
ěť¨ë˛ ě´ě´ ë˛¨í¸ íě 체ě ęł ěĽě§ë¨ ë°Šë˛ěë ę´ëŚŹěę° ěě
íěĽěě íě 체뼟 ě§ě ě ę˛íë ë°Šë˛, íě 체ě ě§ëě 츥ě íěŹ ëśěíë ë°Šë˛, íě 체ě íšě 죟íě뼟 ëśěíěŹ ě´ě ě 돴뼟 ě§ë¨íë ë°Šë˛ ëąě´ ěë¤. íě§ë§, ę´ëŚŹěę° ě§ě íě 체뼟 ě ę˛íë ë°Šěě ëźě ëąě ě¸ëŞ
íźí´ëĽź ě ë°í ě ěęł , ě§ë 츥ě ë°Šěě 꾏ëëë íě 체ě ě§ě ëśě°Šëě´ěź íëŻëĄ ě¤ěš ë° ě ě§ëł´ěě 돸ě ę° ěë¤(3,4). ëí, íě 체ě ě댏 죟íě뼟 ëśěíë ë°Šë˛ě ęł ěĽ ëěě 죟íěę° ěźě íě§ ěě ęł ěĽíě ě ě´ë ¤ěě´ ěë¤(5,6). ě´ëŹí 돸ě ě ě í´ę˛°í기 ěí´ ëł¸ ě°ęľŹěěë íě 체ě ě댏 data뼟 ě¤ěę°ěźëĄ ěě§íęł , ěě§ë data뼟 ě¸ęłľě§ëĽ 모ë¸ě íěŠíěŹ ęł ěĽ ě 돴뼟 ě§ë¨í ě ěë íě 체 ęł ěĽě§ë¨ ěě¤í
ě ę°ë°íěë¤. ę° íě 체 ęł ěĽě§ë¨ 모ëěě ě¤ěę°ěźëĄ íě 체ě ęł ěĽ ě 돴 íëłě ěííëëĄ íěë¤. ëí, íëł ę˛°ęłźë RPI4뼟 íľí´ ę´ëŚŹěěę˛ ě¤ěę°ěźëĄ ě ëŹ ëëëĄ íěë¤.
2. ěě¤í ě¤ęł
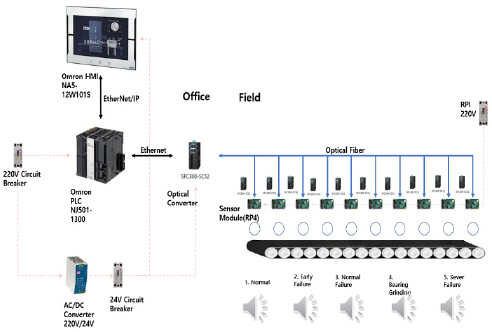
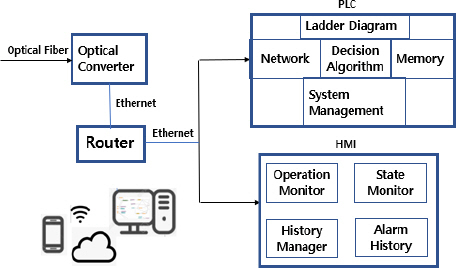
Figure 1ě 본 ě°ęľŹěě ę°ë°í íě 체 ęł ěĽ ę°ě§ěě¤í
ě ě 체 꾏ěąě ëł´ěŹěŁźęł ěë¤. íě 체 ęł ěĽę°ě§ ěě¤í
ě íě 체ě ě ě ëě ěŹëśëĽź íë¨íęł ě깰댏ě ěŹěŠěěę˛ íěĽě ěíŠě ě¤ěę° ě ěĄě´ ę°ëĽíë¤. ë°ëźě ěě
íěĽě ě댏 data뼟 ěśěśíęł ęł ěĽ ěŹëśëĽź ě§ë¨íë ě´ě ę°ě§ ěźě 모ë ëśëśęłź íěĽě ěíŠě íě¸íęł ěŹěŠěěę˛ ěę°ě ěźëĄ ě ëŹíë ë¤í¸ěíŹ ěě¤í
ěźëĄ 꾏ěąëë¤.
2.1 ě´ě ę°ě§ ěźě 모ë
ěť¨ë˛ ě´ě´ ë˛¨í¸ íě 체 죟ěě ë¤ě ëśě° ë°°ěšë ę° íě 체 ě´ě ę°ě§ ěźě 모ëě 죟ëłě ě댏 data뼟 ěě§íęł , ěě§ë dataě ëí´ ě ě˛ëŚŹ ęłźě ě ěííë¤. ě´í, ě ě˛ëŚŹ ęłźě ě ęą°ěš ě댏 dataë ě¸ęłľě§ëĽ 모ë¸ě ě ěŠíěŹ íě 체ě ëí ęł ěĽ ěŹëśëĽź ëśěíë¤.
ě´ëŹí ęłźě ě íľí´ ěťě´ě§ë ę° ëŞ¨ëě ęł ěĽíë¨ ę˛°ęłźë ěě ě ě´ę¸°ě ě ëŹëëë° ę¸°ěĄ´ě ě댏 data ě ě˛´ę° ě ëŹëë ëě ęł ěĽíë¨ ę˛°ęłźë§ě´ ě ëŹëëŻëĄ PLCě ě§ě¤ëë ëśí뼟 ě¤ěź ě ěę˛ ëë¤. íě 체 ě´ě ę°ě§ ěźě 모ëě 꾏쥰ë ë¤ěęłź ę°ë¤. ě˛ë°í ěě
íěĽęłź ěě
íěĽ ě ěě ě¤ěšëë ě´ě ěě¤ě 겏ë ě ěëëĄ ëŞ¨ëě ě¸íě ë°Ší ë° ë°Šě ę°ëĽí ě루미ë ěŹě§ě ë°í 꾏쥰뼟 ě ěŠíěęł , ěě
íěĽě ě댏 data ěě§ě ěí´ ęł ěąëĽě ë§ě´íŹëĽź ě¤ěšíěë¤. ę° ëŞ¨ëě´ ěˇ¨ëí ě댏 dataë¤ě ě ě˛ëŚŹ ęłźě ě ęą°ěł ě ě í ě´ě ę°ě§ íëłę¸°ë˛ě ě ěŠí´ěź íë¤. ě´ëĽź ěí´ Figure 2ě ę°ě´ ěí ěť´í¨í° 모ëě¸ RPI 4 (Raspberry Pi 4) íëĄëĽź ě¤ęłíěë¤. RPI 4ë ěě§ë ě댏 dataě ëí´ data ě ě˛ëŚŹ ęłźě ě ěííęł , ěŹě ě ě¤ęłë ě¸ęłľě§ëĽ 모ë¸ě ě ěŠíěŹ íě 체ě ęł ěĽ ěŹëśëĽź ě§ë¨íë¤. ě´ë ę˛ ěťě´ě§ ęł ěĽě§ë¨ 결곟ë ë¤í¸ěíŹëĽź íľí´ ěě ě ě´ę¸°ě¸ PLCě ě ëŹëë¤.
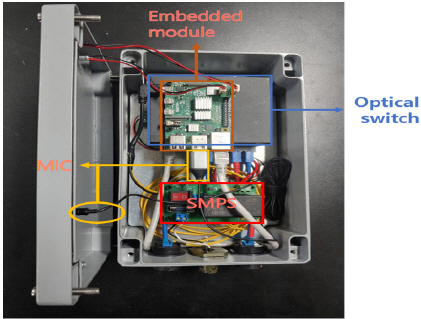
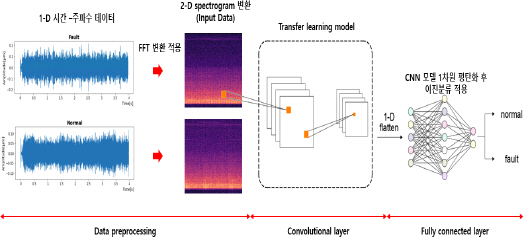
Figure 3ě ě 체 íě 체 ęł ěĽě§ë¨ íëł ęłźě ě ëł´ěŹěŁźęł ěë¤. ë¤ě ëśě° ë°°ěšë ę° ě´ě ę°ě§ ěźě 모ëě ěí´ ěę°-죟íě ííě ě댏 data뼟 ěě§íęł , ěě§ë ě댏 data뼟 ě ě˛ëŚŹí기 ěíěŹ í¸ëŚŹě ëłí(FFT) 기ë°ě 죟íě ëśěě íľí´ ě¤íí¸ëĄęˇ¸ë¨ěźëĄ ě´ëŻ¸ě§ííë¤. ě´í, ě¤íí¸ëĄęˇ¸ë¨ ě´ëŻ¸ě§ëĽź ě¸ęłľě§ëĽě 모ë¸ěě ě´ëŻ¸ě§ ëśëĽě ę°ěĽ ëíě ěźëĄ íěŠëë CNN ěęł ëŚŹěŚě ě ěŠíěŹ ëśëĽíęł , ę˛ěŚęłź íę°ě ęłźě ě ęą°ěł íě 체 ęł ěĽ ě 돴뼟 íëłíë¤. ě¤íí¸ëĄęˇ¸ë¨ě ě°ěě ě¸ ě댏 ě í¸ëĽź FFT ëłíě ě ěŠíěŹ ěę°ě ë°ëĽ¸ 죟íě ěąëśě íŹę¸°ëĽź ë°ě벨 ë¨ěëĄ ííí 2ě°¨ě ě´ëŻ¸ě§ě´ë¤(7). ëí, ě¸ęłľě§ëĽ 모ë¸ě ěŹě ě íěľë CNN 기ë°ě ě ě´íěľ(transfer learning)모ë¸ě íěŠíěěźëŠ°, ě ě´íěľ ëŞ¨ë¸ě Keras applicationěě íěľë ëŞ¨ë¸ ě¤ ě íëę° ę°ěĽ ëěë Xception 모ë¸ě ě ěŠíěë¤(8).
기쥴ě CNN ěęł ëŚŹěŚě convolution layerę° ěŚę°í늴 hyper parameterę° ěŚę°íęł , ě´ëŻ¸ě§ě íšě§ě ěśěśíëë° ë§ě ěę°ě´ ěěë늰, 기ě¸ę¸° ěě¤ě ě ë°íë¤(9). 본 ě°ęľŹěě ě ěŠë Xceptioně convolutional layer 츾ě separable convolution layerę° ě´ 36ę°ëĄ 꾏ěąëë¤. separable convolution layerěěë ě´ëŻ¸ě§ě íšě§ě ěśěśí ë, ę° RGB ěąë ëłëĄ depth wise convolution layer뼟 íľí´ ę°ę°ě íšě§ě ěśěśíęł , point wise convolutioněźëĄ 1 Ă 1 íŹę¸° ě´ëŻ¸ě§ě íšě§ě ěśěśíë¤. ě´ëŹí ë°Šë˛ě convolutional layer 츾ě ě°ě°ëě ę°ěěí¤ëŠ°, ę°ě ěě hyper parameterěě CNN 모ë¸ě 경ëí뼟 ę°ëĽíę˛ í늰, ëěźí ěąëĽě ě ě§íë¤(10). ě´ě ë°ëĽ¸ convolution layer ëąě ě°ě° ęłźě ě ě(1)ěě ě(4)ě íííěë¤.
ěŹę¸°ě, Wë ě´ě ë ě´ě´ě ě
ë Ľ íë Ź, yë 읤ëě ę°ě¤ěš íë Ź, kë ě´ëŻ¸ě§ě ę°ëĄ íŹę¸°, lě ě´ëŻ¸ě§ě ě¸ëĄ íŹę¸°, mě ě´ëŻ¸ě§ě ěťŹëŹ ę°, Conv ë convolution layer, Pw_Convë point wise convolution layer, Dw_Convë depth wise convolution layer, Sep_Convë separable convolution layer뼟 ëíë¸ë¤.
본 ě°ęľŹěěë Python í경ěě ě¤íí¸ëĄęˇ¸ë¨ ě´ëŻ¸ě§ëĄ ëłíí기 ěí´ librosa í¨í¤ě§ëĽź ě´ěŠíěŹ ě댏 dataě¸ wav íěźě ě¤íí¸ëĄęˇ¸ë¨ ě´ëŻ¸ě§ëĄ ëłííěë¤. í˝ě
íŹę¸° 128 Ă 128ě ě¤íí¸ëĄęˇ¸ë¨ ě´ëŻ¸ě§ 34,000ěĽě ěěąíěęł , ě¤íí¸ëĄęˇ¸ë¨ ëłí ęłźě ě¤ ěť¨ë˛ ě´ě´ ë˛¨í¸ ě§ë ě댏ě ě 죟í ěěě ë
¸ě´ěŚě ëśíěí ě ëł´ ëąě ě ęą°íë high pass filteringě íľí´ ě ě ë ě´ëŻ¸ě§ëĽź ěśěśíęł , ě ě˛ëŚŹ ě´ëŻ¸ě§ëĽź Xception 모ë¸ě ě ěŠíěë¤(11,12). high pass filteringě ëě ëěě ęł ěŁźíěë íľęłźěí¤ęł íšě ě´íëĄ ëŽě 죟íě ëěě ě í¸ëĽź ę°ě ěěź ëě ëěě ęł ěŁźíě ě í¸ë§ íľęłźěí¤ë íí°ëĽź ě미íë¤(13). high pass filteringě ě(5)ě ę°ě ëě§í¸ 2ě°¨ ě ëŹí¨ěě ë°Šěě ěŹěŠíěŹ ěęł ëŚŹěŚěźëĄ 꾏ěąíěěźëŠ°, ę°ę°ě ęłěa1, a2, b0, b1, b2ë 30 kHz뼟 ěíë§ ěŁźíě뼟 기ě¤ěźëĄ ě°¨ë¨ěŁźíě뼟 200 Hz뼟 ě¤ě íěŹ ęłě°íěë¤.
Xception 모ë¸ě ě
ë Ľě ě 체 dataset 34,000ěĽě data ě¤ íë ¨ 75%, ę˛ěŚ 15%, ěí 10%ëĄ ëśí íěŹ ěŹěŠíěë¤(14). ě´ íěľ íě(epoch)ë 1,000ěźëĄ ě¤ě íë¤. ëí, ě˝ë°ąí¨ě(callback function)뼟 ěŹěŠíěŹ 10ë˛ íěľíë ě¤ ěě¤(loss)ě´ ěŚę°í늴 ěëěźëĄ íěľě´ ě˘
ëŁëë 쥰기 ě˘
ëŁëĽź ě ěŠíěë¤. ěľě ě ëŞ¨ë¸ íěľě ěí´ Adam ěľě í뼟 ěííěęł ěě¤í¨ěëĄë ě(6)ě binary cross entropy뼟 ěŹěŠíë¤.
ěŹę¸°ě, yië ě¤íí¸ëĄęˇ¸ë¨ě ěśë Ľ ě´ëŻ¸ě§, y ^ i
íë ¨ě ěŹěŠí ěť´í¨í
í경ě PC 기ë°ě´ëŠ° Nvidia-V100 ꡸ëí˝ ěš´ëě 128 Gb ëŠëŞ¨ëŚŹëĽź íěŠíěęł , ě´ě ę°ě§ ěęł ëŚŹěŚě RPI4 ëŠě¸ě ě´ ëŞ¨ëěě ëě ë늰 댏ë
ě¤ ę¸°ë°ěźëĄ ěě¤í
íëě¨ě´ ë° ěěŠ íëĄęˇ¸ë¨ě ě ě´íěë¤. Linux Croně ěě˝ë ěě
ě ě¤íěí¤ë ěĄ ě¤ěźě¤ëŹëĄ RPI4ě 꾏ëęłź í¨ęť shell scriptě ě¤íěí¤ęł , 1 minë§ë¤ shell script íěźě ë°ëłľ ě¤ííë¤. ëŠëŞ¨ëŚŹě íě ě죟íë ěěŠ íëĄęˇ¸ë¨ě ë§ě´íŹëĽź íľí ě댏 data ěě§, data ě ě˛ëŚŹ, ě¸ęłľě§ëĽ ě ěŠ, ë¤í¸ěíŹ íľě ě ěííë ěěëĄ ę°ě§ ë° ě ěĄ ę¸°ëĽě ěííë¤. ě§ë¨ě´ ěěë늴 4 sę° ë§ě´íŹëĄ ě댏 data뼟 ěě§íęł , ěě§ë data뼟 ě ě˛ëŚŹíěŹ ě´ëŻ¸ě§ ííëĄ ě ěĽíěŹ ě¸ęłľě§ëĽ 모ë¸ě ě ěŠí´ íě 체 꾏ë ěí뼟 ě§ë¨íę˛ íěë¤.
2.2 ě ě´ ěě¤í
ě ě´ ěě¤í
ě ę°ě§ 모ëěě ë¤ě´ě¤ë íëł data뼟 졨íŠíěŹ ę´ëŚŹíë ëśëśěźëĄ Figure 4ě ę°ě´ 죟ě ě´ę¸°ě¸ PLCě ěŹěŠě íę˛˝ě¸ HMIëĄ ęľŹěąëë¤. 본 ě°ęľŹěě ěŹěŠë PLCë Omron ěŹě NJ501-1300 기ë°ěźëĄ ë´ěĽë EtherNet/IP íŹí¸ëĽź ě´ěŠíěŹ ě¸ëśě íľě ě´ ę°ëĽíëëĄ íěë¤. íě 체 죟ëłě ëśě° ë°°ěšë ę° ě´ěę°ě§ ěźě 모ëě TCP/IP íľě ěźëĄ ěě ě ęł ě IDě íěŹ ëě ě ě´ ę°, ě¸ęłľě§ëĽě ęą°ěš íě 체 꾏ë ěí ę° íšě ëě 모ëě ë°ëź ě댏ě íęˇ íŹę¸°, CPU ě¨ë ëąě data뼟 PLCëĄ ëł´ë´ęł , ěë˛ě¸ PLCë ęł ě ID뼟 ě´ěŠíěŹ ě´ě ę°ě§ 모ëě 꾏ëśíěŹ í´ëšíë ëĄě§ě ě¤íěěź Figure 5ě ę°ě´ íě 체 꾏ë ěí뼟 ě¤ěę°ěźëĄ ě
ë°ě´í¸í늰 HMI뼟 íľí´ ěŹěŠěěę˛ ě댰ë¤.
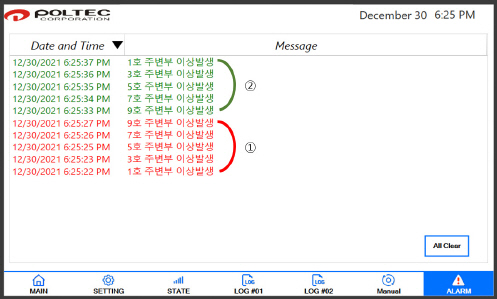
ęł ěĽě§ë¨ íëłě ě´ě ę°ě§ ěźě 모ëěě ě ëŹëë íëł data뼟 기ë°ěźëĄ ěš´ě´í°ëĽź ëěěí¤ęł , ě§ěě ě¸ ęł ěĽ ě í¸ę° ę°ě§ë늴 ęł ěĽěźëĄ íë¨íěŹ ę´ëŚŹěěę˛ ě댰ë¤. ě´ě ę°ě§ ěźě 모ëëĄëśí° ě ëŹë°ě dataë ęł ě IDě ë°ëź ę°ę°ě ěšě
ěě ě´ęšę° íšě ěě
íěĽ ěíŠě ë°ëź ě¤ě ë ě ě´ ę°ě 기ě¤ěźëĄ ëěíë¤. ě´ë ě¤ě ę°ëĽí ěěë ě 체 ěš´ě´í¸ ěěš, ęł ěĽ ěíěš, ęł ěĽ ííěš ëąě´ ěë¤. ě 체 ěš´ě´í¸ ěěšë ęł ěĽ ě í¸ě ěš´ě´í°ě ěěšě´ęł , 10ě ë¨ěëĄ 10âź100 ěŹě´ě ę°ě ě¤ě í ě ěë¤. ęł ěĽ ěíěšë ě 체 ěš´ě´í¸ ěěšě ęł ěĽ ěíěš(%)ě í´ëšíë ěš´ě´í¸ě ëëŹí늴 ęł ěĽěźëĄ íë¨í ę˛ě¸ě§ëĽź íëłíęł , ęł ěĽ ííěšë ęł ěĽěźëĄ íë¨ë ę˛˝ě° ěš´ě´í¸ę° ě 체 ěš´ě´í¸ ěěšě ęł ěĽ ííěš íźěźí¸ě í´ëšíë ěěšëł´ë¤ ëŽěě§ëŠ´ ęł ěĽě í´ě íęł ě ěěźëĄ íëłí ę˛ě¸ě§ëĽź 결ě íë¤.
2.3 Data ěě§ ë° ë¤í¸ěíŹ ěě¤í
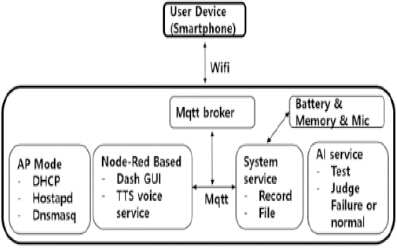
Figure 6ě í´ëěŠ data ěě§ ěĽěšě ę¸°ëĽ ęľŹěąě ëł´ěŹěŁźęł ěë¤. ě 뢰ë ëě ě¸ęłľě§ëĽ 모ë¸ě íěľě ěí´ěë ë¤ěí ě˘
ëĽě ě댏 dataě ęł ěĽ ě ëł´ę° ě íí ëśëĽë ě댏 dataę° íěíë¤. íě§ë§ ě¤ěšëęł ě´ěëë ěě¤ í경ěě ęˇě ë° ě ě°¨ě 돸ě ëĄ íěĽěěě ě§ě ě ě¸ ěąěˇ¨ę° ěě ëĄě§ 몝íęł , ęł ěĽě´ ě¸ě ě´ëě ë°ěí ě§ ëŞ¨ëĽ´ë ěíŠěě ěě§í ęł ěĽ dataë ě˘
ëĽę° ě íě ě´ë¤. ëí, ěť¨ë˛ ě´ě´ ěě¤í
ě´ ę°ë ěěë íěĽě ě ꡟí ě ěě´ ëŻ¸ëŚŹ ěŹě ě ěšě¸ë ě¸ë Ľěě ěąěˇ¨í ě댏뼟 ěě§íěŹ ëśëĽí´ěź íë¤. ëšě 돸ę°ě ěí´ ěě§ëë ě댏 dataë ěť¨ë˛ ě´ě´ ë˛¨í¸ ëĄ¤ëŹ ě ě, ęł ěĽ í´ëě¤ě ëśëĽę° ě ííě§ ěěě ëšěˇí ěëŚŹę° ě ěęłź ęł ěĽ í´ëě¤ě ě´ę¸°ěěě ëśëĽę° ëë¤ëŠ´ ě¸ęłľě§ëĽ 모ë¸ě íěľě´ ěëě§ ěęł íšě ě댏 ěěěě ě íí ě§ë¨ě´ ëśę°ëĽíę˛ ëëŻëĄ, 졨ëë dataě ě§ęłź ěě ëě´ę¸° ěí´ěë íěĽ ě 돸ę°ę° data 졨ë ěě ě§ě ěě§íęł , ë
šěě´ ę°ëĽíëëĄ ě´ě ę°ě§ ěźě 모ëě íŹí°ë¸ ííëĄ ě ěíěë¤. ěźë°ě ěźëĄ ěě
íěĽě 돴ě íľě ě¤ëšę° 꾏ěśëě´ ěě§ ě기 ë돸ě íŹí°ë¸ ěĽëšě ě¤ë§í¸í°ě ě°ę˛°í기 ěí´ě RPI4뼟 돴ě ěĽëšëĄ ęłľě ę¸°ëĄ í¨ęť ěŹěŠí ě ěę˛ ęľŹííěë¤. ě´ëĽź ěí´ Dnsmasq, Hostapdě ę°ě ěë˛ëĽź ě¤ěšíěŹ ëŹ´ě ëĄěťŹ ë¤í¸ěíŹëĽź 꾏ěąíěęł , ę´ëŚŹěę° ě¤ë§í¸í°ěźëĄ WifiëĄ ě ěíęł ěš ë¸ëźě°ě 뼟 ě´ěŠíěŹ íŹí°ë¸ ěĽëšě 쥰ěě´ ę°ëĽíę˛ íěë¤. ëí, ě겊 ěëšě¤ëĽź ěíěŹ Node-Red뼟 기ë°ěźëĄ ě¤ęłíěěźëŠ°, íëě¨ě´ ěěě RPI4ěě Python íëĄęˇ¸ë¨ěźëĄ íľě íěęł ě겊 ě¸í°íě´ě¤ë MQTT íľě ěźëĄ ě˛ëŚŹíěë¤. ěľě˘
ě댏 dataë RPI4ě 결íŠë USB ě¸ěĽ ëŠëŞ¨ëŚŹě ě ěĽíěë¤. ę´ëŚŹěě ě¤ě ěěë ě댏ě ëśëĽ(ě ě, ě´ę¸°, ě¤ę¸°, ë§ę¸°)ě íě 체ě ë
šě기ě 깰댏, ë
šě íěëĄ í´ëë ëśëĽ/깰댏/ë ě§/íěě 꾏ëśěźëĄ ěěąë늰 íëĄęˇ¸ë¨ě ëě ěíë í
ě¤í¸ëĄ íěëę˛ íěë¤. ę´ëŚŹěě ě ꡟ ë°Šë˛ě íŹí°ë¸ ěĽëšě ě¤ë§í¸í°ěźëĄ 돴ě ě°ę˛°, ěš ë¸ëźě°ě 뼟 ě´ěŠíěŹ Node-RedëĄ ě ěíęł ęľŹěąë ě¸í°íě´ě¤ëĽź ě´ěŠíěŹ ę´ëŚŹě í경ě 꾏ěąíěë¤.
3. ëě ě¤í
ëě ě¤í ě´ě ě train and validation dataset 기ë°ěźëĄ íěľí Xception 모ë¸ě ëí íę° ë° ě츥ě ěííěë¤. íę° ë° ě츥ě test datasetě íľí´ ěííěěźëŠ°, Figure 7ěě ëíë¸ ëŞ¨ë¸ íěľę˛°ęłźë íë ¨ě´ ě§íë ěëĄ íë ¨, ę˛ěŚ ě¤ě°¨ë ě ě 0ě ę°ęšěě§ëŠ°, ě íëë 99.56 (%)ě 결곟뼟 íě¸íěë¤. ëí, Table 1ěě ëíë¸ íę°ę˛°ęłźë 99% ě´ěě ëě ě íë뼟 ëíë´ěë¤. ëíě ě¸ ëśëĽëŞ¨ë¸ ěąëĽ íę°íëŞŠě¸ ě ë°ë(precision), ěŹíě¨(recall), 쥰ííęˇ (F1-score)ě íľí ëŞ¨ë¸ ě츥 결곟 ěěšë ëę˛ ě¸Ąě ëěěźëŠ°, ě´ě ëí ěěě ě(7)ěě ě(9)ě íííěë¤. ëí, ě´ě ëí ëśëĽ ěąëĽ íę° ě§íě ě 보뼟 Table 2ě ëíë´ěë¤.
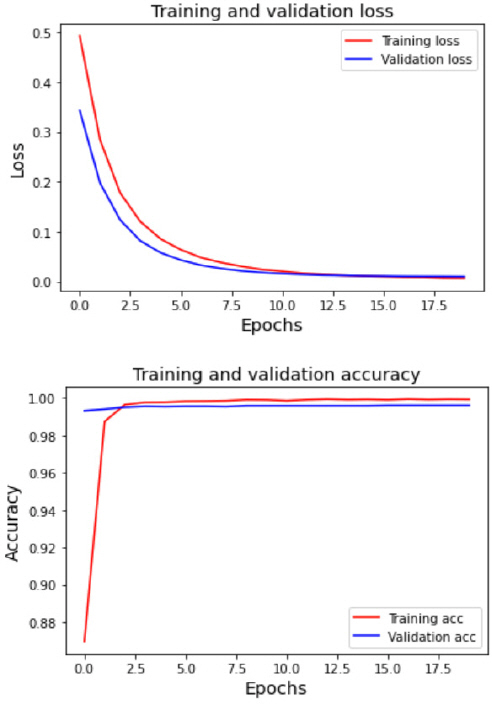
Table 1
Xception Model Evaluate Result
| Test Dataset | Precision | Recall | Accuracy | F1-score |
|---|---|---|---|---|
| Normal | 0.9955 | 0.9875 | 99.15 (%) | 0.9915 |
| Fault | 0.9876 | 0.9955 | 0.9915 |
Table 2
Classification Evaluation Metrics
| Real Answer | |||
|---|---|---|---|
| True | False | ||
| Classification Result | True | True Positive (TP) | False Positive (FP) |
| False | False Negative (FN) | True Negative (TN) | |
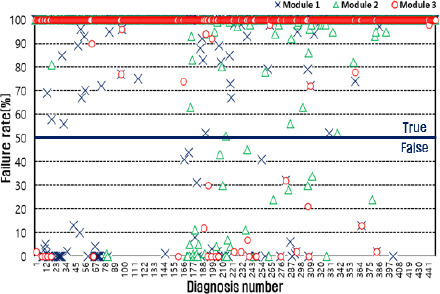
Figure 8ě Xception 모ë¸ě ěąëĽ í
ě¤í¸ëĽź íěě ëě ëŞ¨ë¸ ëśëĽ 결곟뼟 ëíë¸ë¤. ęł ěĽ datasetě ě´ 2,000ę°ě datasetěě 9ę°ëĽź ě ě¸íęł ëŞ¨ë ě ëľěźëĄ íëłíěęł , ě ě datasetě 25ę°ëĽź ě ě¸íęł ëŞ¨ë ě ëľěźëĄ íëłíěë¤. ě´ë ę˛ ę˛ěŚë Xception 모ë¸ě íŹí°ë¸ ěĽëšě ě ěŠíěŹ ě¤ë´ 모ěě¤íě ě§ííěë¤.
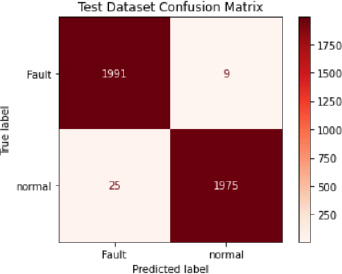
Figure 9ë ě¤ë´ 모ěě¤í í경ě 꾏ěśí 모ěľě ëł´ěŹěŁźęł ěë¤. ě¤ě ě ěë íě 체 ęł ěĽě§ë¨ ěě¤í
ě íěĽě ě¤ěší기 ě´ě ě Figure 8ęłź ę°ě´ ę°ěí경ě ë§ë¤ě´ 미댏 ë
šěˇ¨ë íěĽ ě댏뼟 ě´ěŠíěŹ ě¤ë´ě¤í í경ěě 모ěě¤íě ě§ííěë¤. ě´ë ěť¨ë˛ ě´ě´ ě댏ě ěŹěě ě¤ě íë Ľ ë°ě ěěě 졨ëí íě 체 꾏ëěě ë
šěíěŹ í¸ě§í ě댏 data뼟 ě´ěŠíěěźëŠ°, ę°ě§ ě í¨ ěŁźíě ë˛ěę° 38 Hzâź20,000 Hzě¸ beolit 17 ě¤íźěť¤ëĽź ě´ěŠíěŹ ěŹěíěë¤. ě¤íě ěŹěŠë ě댏 dataě ě˘
ëĽë ěŁźëł ěěě´ ěë ě ě ě댏, ěŁźëł ěěě íŹí¨í ě ě ě댏, íě 체 ęł ěĽ ě댏 ëąě´ëŠ°, ę° ě´ě ę°ě§ ěźě 모ëë§ë¤ 1 měŠ ě´ę˛Š íęł , ě˝ 30 min ëě 츥ě ě ě§íí í ę° ě댏 dataě ëí ě§ë¨ 결곟뼟 íě¸íěë¤. Figure 10ě ěŁźëł ěěě´ ěë ě ě ë
šěě ě댏 dataě ě¤íí¸ëĄęˇ¸ë¨ 결곟ě´ęł , Figure 11ě ë
¸ë ě댏, ěě
ěě ëí ě댏 ę°ě ěŁźëł ěĄěě´ ěĄ´ěŹíë ěíŠěě ě ě ě댏 dataě ëí ě¤íí¸ëĄęˇ¸ë¨ 결곟ě´ë¤. Figure 12ë ęł ěĽ ë
šěě ě댏 dataě ě¤íí¸ëĄęˇ¸ë¨ 결곟ě´ë¤. ěŹę¸°ě ě¤íí¸ëĄęˇ¸ë¨ě xěśě ěę°, yěśě 죟íě, ěě ě í¸ě ę°ë뼟 ëíë¸ë¤.



ě¤í결곟뼟 ëśěí´ ëł´ëŠ´ ěŁźëł ěěě´ ěë ě ě ě댏 dataě ěŁźëł ěěě íŹí¨í ě ě ě댏 dataě ëí´ ě´ëŻ¸ě§íë ě¤íí¸ëĄęˇ¸ë¨ęłź ěěšę° 모ë ě ě ěíëĄ íë¨íěë¤. ěŚ, ěí ěĄěě´ ěĄ´ěŹí´ë ęł ěĽěźëĄ íëłëě§ ěěě íě¸í ě ěěë¤. ë°ëŠ´ ęł ěĽ ě댏ě ëí´ěë ě´ëŻ¸ě§íë ě¤íí¸ëĄęˇ¸ë¨ěě ě ëŞ
í ě¸ëĄ ě ě´ ęˇěšě ěźëĄ ë°ëłľë¨ě íě¸í ě ěęł , Table 3ě ëł´ěŹěŁźęł ěë ę° ě댏 dataě ëí ě ě ë° ęł ěĽ ě§ë¨ëĽ ěě ëě ěě¤ě ëíë´ë ę˛ě íě¸í ě ěë¤.
Table 3
Classification Result of Sound
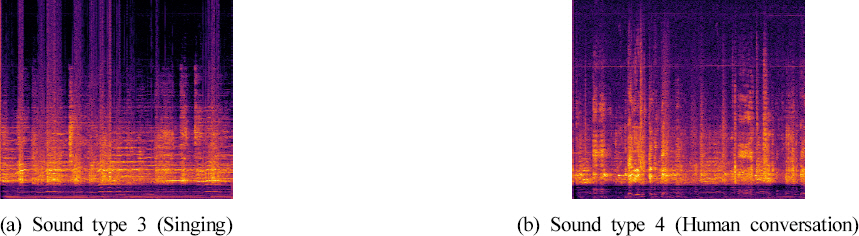
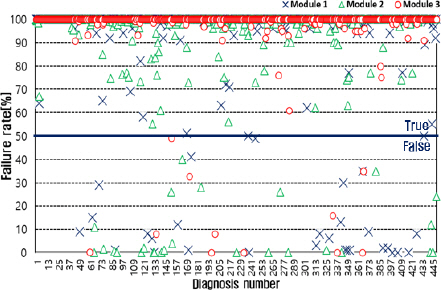
Table 3ě ě댏 dataě ě§ë¨ 결곟뼟 ëśěí 결곟ě´ë¤. íě 체 ě´ě ę°ě§ ěźě 모ë 3ëě ëí´ě Figure 9ě ę°ě´ 꾏ěąíęł , ěŁźëł ěěě´ ěë ě ě ě댏, ěŁźëł ěěě íŹí¨í ě ě ě댏, ęł ěĽ ě댏 dataě ëí´ 30 minę° ě¤ë´ 모ěě¤íě ěííěë¤. ě¤í결곟 3ëě ě´ě ę°ě§ ěźě 모ëěě 86âź97.6%ëĄ ëě ěěšě ě íëëĄ íě 체ě ęł ěĽě§ë¨ 결곟뼟 íě¸í ě ěěë¤. Figures 13âź15ë ěŁźëł ěě ěë ě ě ě댏, ë
¸ëë ëí ëą ěŁźëł ěěě íŹí¨í ě ě ě댏, ęł ěĽ ě댏 dataě ëí´ 30 min ëě 4 së§ë¤ ě댏 data뼟 ě§ë¨í 결곟 ꡸ëí뼟 ëł´ěŹěŁźęł ěë¤. ëëśëś 90% ě´ěě ëě ě íë뼟 ëł´ěë¤.
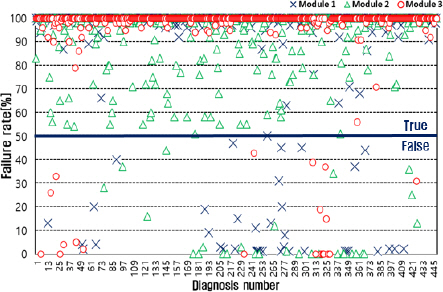
Figure 14
Diagnosis result of normal sound data including ambient noise (Singing & human conversation).
ě¤ë´ 모ěě¤íě ěí í, ěť¨ë˛ ě´ě´ 벨í¸ę° ě¤ěšë ě¤ě ěě
íěĽě ě˛ěĽě ě´ě ę°ě§ ěźě 모ëě 5 m ę°ę˛ŠěźëĄ 10ë뼟 ě¤ěšíěŹ íěĽ ě¤ěŚě¤íě ěííěë¤. ë¤í¸ěíŹë ěť¨ë˛ ě´ě´ ë˛¨í¸ íěĽ, ę´ ëśë°°í¨, ě 기ě¤ě ęą°ěł íľě ě¤ě PLC í¨ě˛´ ěěëĄ ě°ę˛°ëę˛ íěë¤. ę´ ëśë°°í¨ęłź ě ę¸°ě¤ ěŹě´ě 깰댏ë 50 m ě ëě´ęł , ě 기ě¤ęłź íľě ě¤ě 5 km ë¨ě´ě ¸ ěěš íęł ěë¤. íľě ě¤ěë 모ëí°ę° ě¤ěšëě´ ěě´ ěě
íěĽě ěť¨ë˛ ě´ě´ 벨í¸ę° 꾏ë ě¤ě¸ 모ěľě ě¤ěę°ěźëĄ íě¸í ě ěěźëŠ°, ě´ę¸° ěíěěë ěť¨ë˛ ě´ě´ ěě¤í
ě ě ëś ě ě ëěě´ íěëěěźëŠ° ęł ěĽ ě§ë¨ë ëŽě ěěšëĽź ëł´ěŹěŁźě´ ěě¤í
ě´ ě ě ëěíęł ěěě íě¸í ě ěë¤.
ęł ěĽ íě 체ě ëí ęł ěĽě§ë¨ ě¤íě ěě
íěĽěë ęł ěĽěíě íě ě˛´ę° ěě§ ěě기 ë돸ě ě¤ë´ 모ěě¤íěě ěŹěŠí ě¤íźěť¤ëĽź ěŹěŠí´ íěĽě ě¤ěšë ě´ě ę°ě§ 모ë 5ë˛ íë¨ëśěě ęł ěĽ ě댏뼟 ěŹěíěŹ ě¤ííěë¤. ě¤í결곟, Figure 16ęłź ę°ě´ 5ë˛ěě ě§ěě ě¸ ęł ěĽě ę°ě§íěŹ íěíěęł . ëšęľě ěěęłź ë¨ě´ě ¸ ěë 4ë˛ęłź 6ë˛ ëŞ¨ëěěë ëŽě ěěšě´ě§ë§ ęł ěĽ íě뼟 ëíë´ěë¤. ë°ëźě 본 ě°ęľŹěě ę°ë°í íě 체 ęł ěĽě§ë¨ ěě¤í
ě ě¤ě ěě
íěĽěěë ëě ěě¤ě ęł ěĽě§ë¨ 결곟뼟 ëł´ěęł , ě겊ě íľí´ ę´ëŚŹě ë° íľě ě¤ě íě 체ě ëí ęł ěĽě§ë¨ 결곟뼟 ěííę˛ ě ëŹíë ę˛ě íě¸íěë¤.

4. 결 ëĄ
본 ě°ęľŹë ěť¨ë˛ ě´ě´ ë˛¨í¸ ěě¤í
ě íě 체 ęł ěĽě§ë¨ íëłě ěí´ ě댏 ě 보뼟 ěśěśíęł ě¸ęłľě§ëĽě 기ë°ěźëĄ ęł ěĽě íëłíë ěě¤í
ę°ë°ě ę´í ę˛ě´ë¤. ěě
íěĽě ě댏뼟 ě¤ěę°ěźëĄ 졨ëíęł ě˛ëŚŹí ě ěë ě´ě ę°ě§ ěźě 모ëě ě¤ęł ë° ě ěíěęł , ę°ę°ě 모ëě CNN 모ë¸ě ě ěŠíěŹ ë
댽ě ěźëĄ ęł ěĽ íëłě í ě ěę˛ ě¤ęłíěë¤. ě¸ęłľě§ëĽě´ ě ěŠë ě´ě ę°ě§ ěźě 모ëě ěě
íěĽě ěźě í ę°ę˛ŠěźëĄ ëśě° ë°°ěšíěŹ íěĽě ě 보뼟 ě¤ěę° ě˛ëŚŹíěěźëŠ° íëłë ě ëł´ë ě겊 모ëí°ë§ ěě¤í
ěě ěě§íěŹ data뼟 ëě íěęł ě´ëĽź íěŠíěŹ ěľě˘
ęł ěĽě íëłíěë¤. ę°ë°ë íě 체 ęł ěĽę°ě§ ěě¤í
ě ě¤ë´ 모ěě¤íęłź ě¤ě ěě
íěĽěěě ě¤ěŚě¤íěźëĄ 꾏ëśíěŹ ěííěë¤. ě¤í결곟, ě¤ë´ ë° ě¤ě ěě
íěĽ ëŞ¨ëěě íě 체ě ě ě ë° ęł ěĽě ě¤ěę°ěźëĄ ě ííę˛ ě§ë¨íë ę˛ě íě¸í ě ěěë¤. ë°ëźě 본 ě°ęľŹěě ę°ë°í ě¸ęłľě§ëĽ ę¸°ë° íě 체 ęł ěĽě§ë¨ ěě¤í
ě ěť¨ë˛ ě´ě´ ë˛¨í¸ ęł ěĽ ě 돴ě ëí´ ěě
íěĽě ě§ě 밊돸íěŹ ě˛´íŹ íě§ ěęł ě겊ěźëĄ íěĽě íě 체 꾏ë ěí뼟 íě¸í ě ěě´ ě¤ěę° ěíŠ ëě˛ę° ę°ëĽíęł , ëźě ěŹęł ëą ě°ě
ěŹí´ě ë°ě ę°ëĽěąě ě¤ěź ě ěě ę˛ěźëĄ íë¨ëë¤. íĽí ě°ęľŹěěë ě´ě ę°ě§ ěźě 모ëě ěííě ëí ě°ęľŹëĽź ěííęł , íě 체ě ëí ë¤ěí ęł ěĽ ë° ě ě ě댏 data뼟 ěě§íěŹ, dataě ë¤ěěąě ë°ěíęł , íě 체ě ęł ěĽ í¨í´ęłź íšě§ě ëěą ě ë°íę˛ ě°žěë´ë ě¸ęłľě§ëĽ ëŞ¨ë¸ ę°ë°ě ëí ě°ęľŹëĽź ěííęł ě íë¤.




